
����ע������Ŀ������Makezine������3D Robotics�������Jason Short��Makezine������Ŀ���Ѷȶ�λΪ��Very Difficult���dz��ѣ�����������Ҳ����սһ�°ɣ�
��Ҫ����Լ�������������ˮƽ����������Եط��ˡ��������ǵ�����ArduRoller����һ̨�����Զ�ƽ��ĵ����ڻ����ˣ���������ӵ��������������������������̨�Ǵ�ͳ�������Կ�������ͨ��һϵ���ϰ���ת�ǡ����·�棬ˮͰ��б�µȶ�����˵��С��һ�������⣬��Ҳ������һ��һ�ȵ�SparkFun���˼�ʻ���������еIJ�����Ʒ��
���ȣ���ѡ��������3D Robotics��APM 2.5��ģʽ�Զ�����ϵͳ����Ϊ�������˼������л���������Ĵ����������⣬���������Դ���������������ѣ�ArduPilotϵͳҲ��Ϊ���졣���ڸ��������ܻ�����������˵��������Ǹ���ƽ̨��
����Զ�ƽ������˲��ù��Բ���װ�ã�IMU����Ϊ���ģ���װ�ð��������������ݣ����ٶȼƺʹ����ƣ����ƾŸ����������ܲ������ʿ��Դﵽǧ�ΨM�룬�������������˷������Ҿ����㷨��DCM��������ص���ѧ�˲�����ɸ��õ�����ÿ�������������ܡ��û����˻������˸�����Ĵ��룬�����Ϳɿ��ټ���������˵�ʵʱ״̬���ǶȺ�ת�ٵȣ����Ը��õı���ƽ�⡣����������Ƶ�ɣ�
������ʹ�����˱���ƽ�⣿
������ƽ������˵������ص����������ʵ�Dz��ȶ��ģ����������ĵ�����ȴ����������һ���ܴ�Ĺ��Ծأ��Ӷ��Ż�������б���ٶȡ��ڲ��������ǾͿ���������һ���ԣ������ƶ������������ⲿ����б�������������Ա��ֻ����˵�ƽ�⡣

���������������е�һ����PID��·�����������ƽ�⣺
�������̽���������б�ĽǶ�������ỻ������ش������������Ϳ��Կ��������������ⲿ�������Ӷ�����ƽ�⡣
������������ԭ�����ƣ��������Ѽ��������нǶ������ܺͣ��Ӷ�����������⡣
���ǰ���������ӹؼ������������Ǿ������ƻ����˵ļӼ��١�
����������
�������Ļ����˾Ϳ��Կ�ʼ�������ˡ�����ƽ��û�ܱ��ֶ�ã�������Ϊ���ϼ��ٶ�ˤ���ˡ�����ڹ����л�������ͼ������̬����ô����������ǰ���ˡ�
��������ֻ�ò��ô�ֱ�����ķ���������ǰ�������ȣ�Ҫ�����ӵ���ת����һ���������ٶȣ��������ܲ����㹻������������б������Ȼ���ڻ����˽Ƕȿ��ٱ仯ʱ���ṩһ�����������Ա��������ȶ�����һ�㷨�����ڶ�����Ĺ۲��о�����Ϊ�����������Ƽ�ʱ��Ŭ������ƽ�⡣������˵�������˶�Ա����ײʱ�ͻ����Ȳ���б����������ƽ�⡣
���������ǻ�����ƽ���㷨�Ĺؼ���ֻ�����������˲����ߵĸ�˳���ߵĸ�Զ��
��������
��Ҫʵ����������������Ҫ��ȷ��������������ڷ�λ����Ŀ�ĵء�GPS�����ã����侫��ֻ�м��ף�����������Ҫ���Ǿ�ȷ�����Ķ�λȷ�ȡ�

��ʽ��������ɽ�������ߵ�������ͬʱҲ��GPS���˺ܺõĸ���������Pololu��˾�ĵ��������˿�ѡ�Ļ���ЧӦ��������������������������С�ʹ�����ת���ӹ��������������Ϳ��Լ�������ֵ��ٶȡ������˴��ص�ArduinoPro MiniҲ��ǿ�������Զ�ȡ���Ա�������ÿ����ǧ�ε����壬Ȼ����Щ����ͨ��I2C�ӿڴ����Զ���ʻϵͳ��ֻҪ֪�������ӵİ뾶�������˾Ϳɼ�������ߵ��ٶȺ���̡����⣬������֪���Լ���ǰ�������������Ϳ����ڶ�ά�ռ��ᆱȷ�ĸ��Լ���λ��GPS�����������з��������˸����Ľ�ɫ����ֻҪ��֤�������ܾ�ȷ��ִ����һϵ�ж������С�
�������ʻ�б���ס��������Ҳ�ܸо��������ᵹת������ʻ������ת�ٴν��г��ԡ�
�����˵�������������������·������ϵͳ����������ArduCopter�ϵĸĽ��棬�������Ǿ�վ����ǰ�˵ļ���ϣ�ʡ���˴����ľ�����ʱ�䡣
��ī���ˣ����Լ�װһ���ɣ�3-5��Сʱ���ܸ㶨���ܻ��Ѵ�Լ��400��500��Ԫ�������һ��г���ϸ��װ�䲽�衣
��һ���������������
Pololu��ˢֱ������Ѿ�װ���˱����������⣬һ��34:1�ij��ּ���װ����������ߵ����Ť�ء�
��װ�˱���������̥������������4���ĵ���ᣬ�������̥���������������˵�ԽҰ�����������н������ն�����
�ڶ�������3d��ӡ���������
������������ҵ�����3D��ӡ�ļ����ĵ����ڴ�ӡ��������ʹ����MakerBot Replicator 2X 3D��ӡ����

����������װ���
�����װ���ոմ�ӡ���Ļ����У���Ȼ������ͦ���ϣ����һ��Ǽ��˵����۽���

���IJ������Ӹ�����Ԫ����
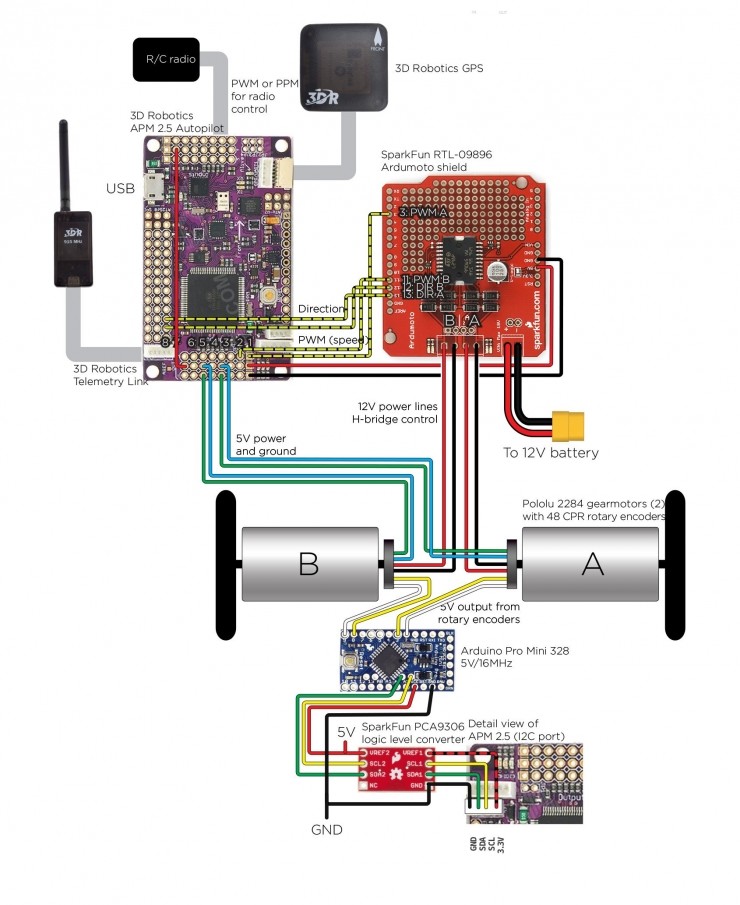
��APM����ϵͳ�������֡�����ƽת������Arduino Mini ����·ͼ��ԭ��ͼ����������������
��GPSģ������ߵ�ң���豸�����������Ա�����˽�������������
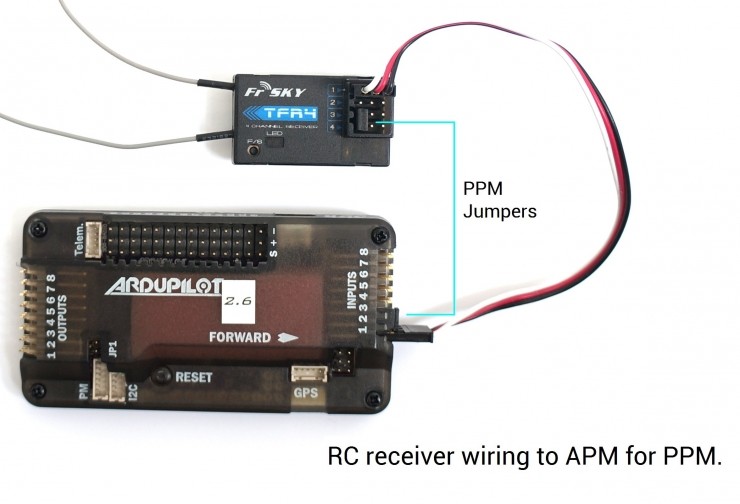
�ֶ��ٿػ����������R/C���ջ�����������PPM���ջ�����APM�Դ����������������ͺá�
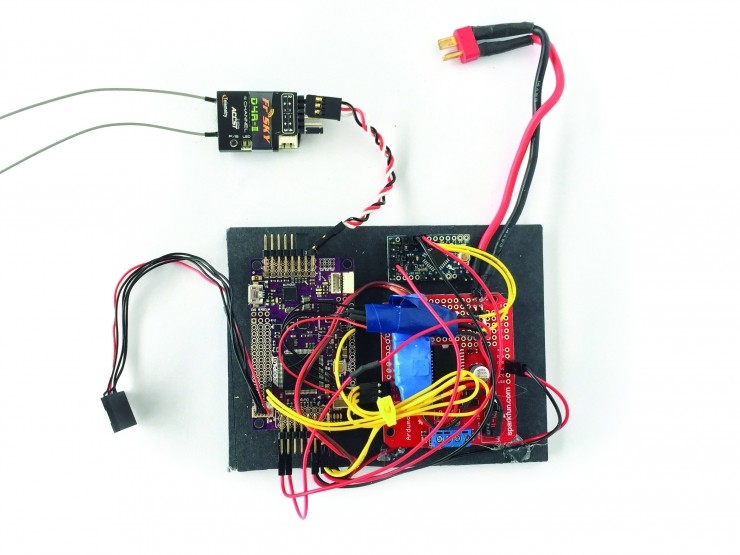
�����۽���Ԫ����ճ��һ�����ϰ��ϣ��������������������ˡ����⣬�Զ�����ϵͳ�ɱ�װ���˷���
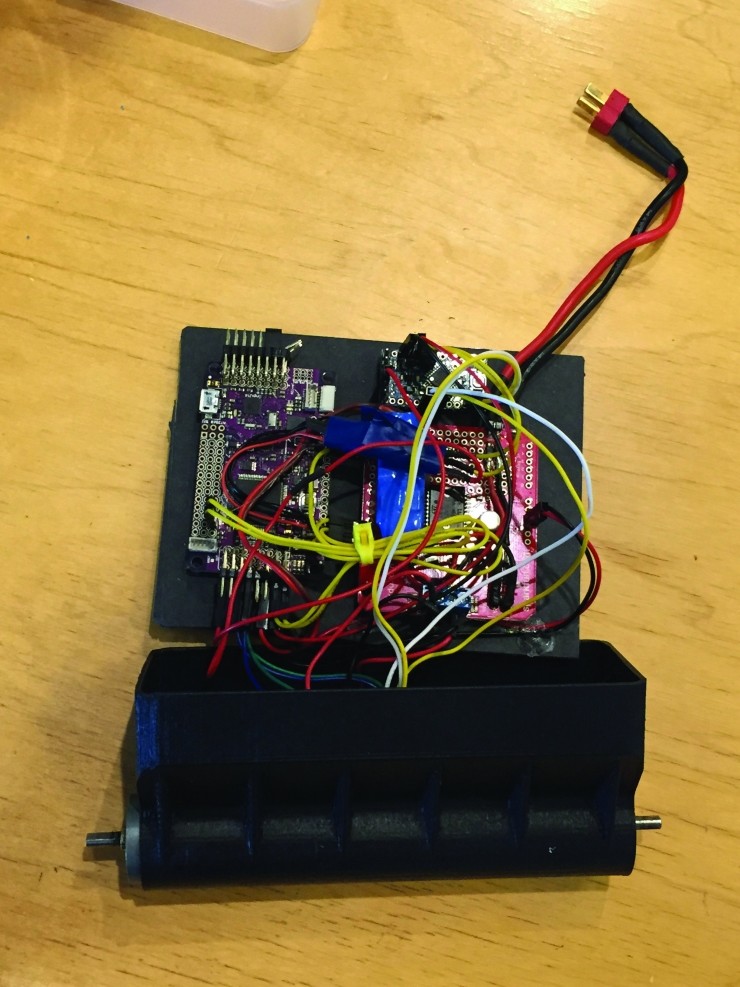
���Ԫ����������������������·��Ž������С�
���岽����װ
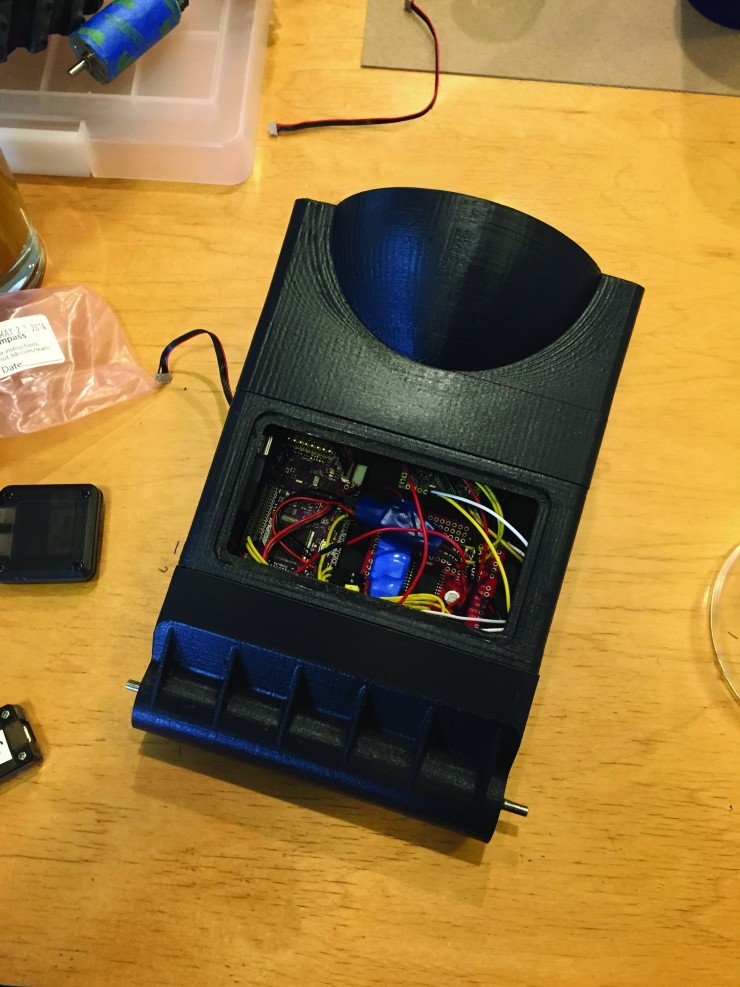
�������в�װ�ڻ����ϣ�Ȼ�����ϲ���������ؾͷ��ڻ����ϲ���Ȼ��Դװ�ڻ����˲��档
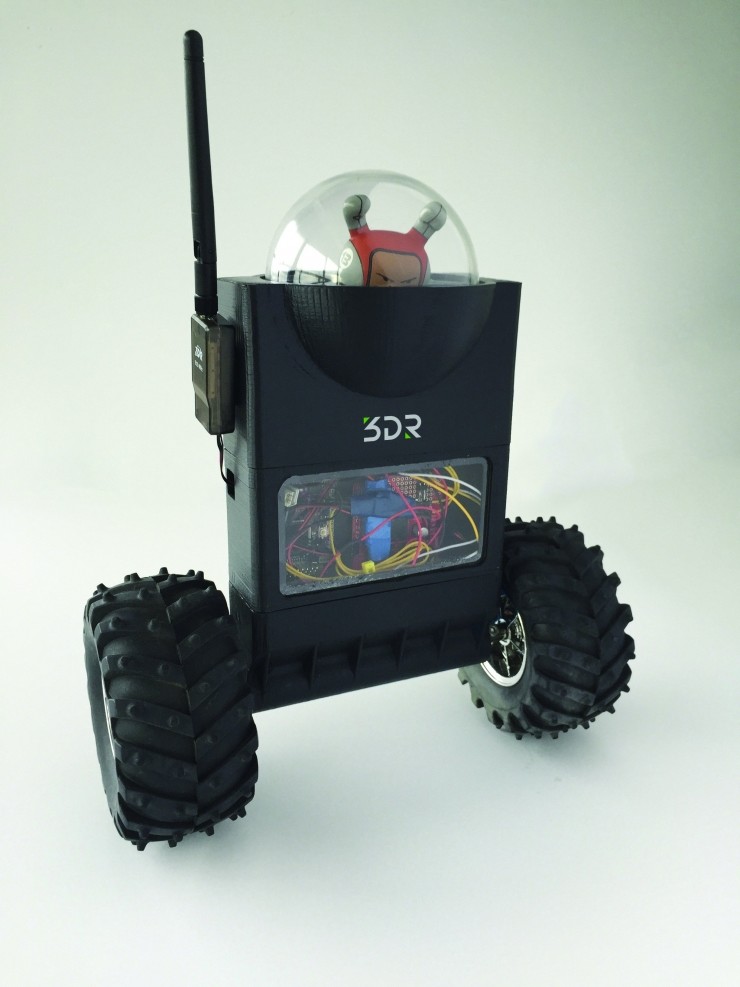
��������װ���ӡ�

�����������ʵ���Ǵ�����ѷ����ĵ�ʥ�������Σ�����LEDԪ�������Ĺ������������ա�
��������˲���װ�����ߵ�ң���豸��ͨ��������Ը��������ƶ������ֱ�Ӷ�����в��ݡ�
��������������������

����ArduRoller��Դ��������ʹ����ΪArduPilot-Arduino�Ĺ��߽������APM 2.5��
������ʽ��������Դ������Ȼ����Arduino IDE�������Pro Mini��
��Ҫ�û���������ִ����������Ҫ����PC���Mission Planner���������ذ����DroidPlanner 2��
���߲������
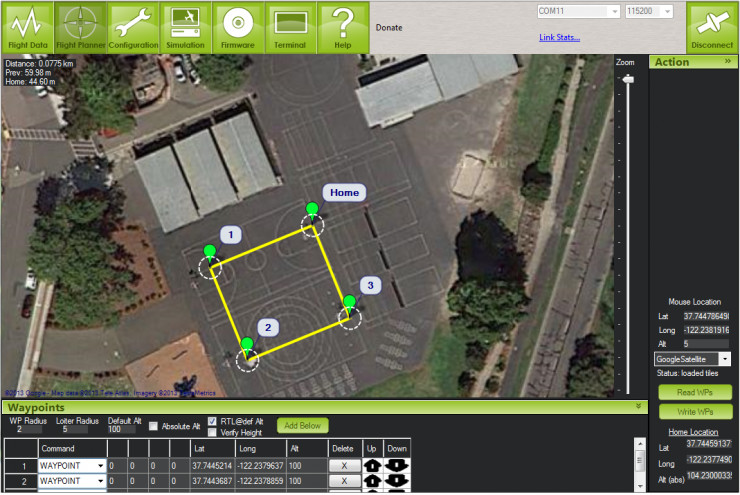
װ�û�����֮��Ϳ��Ծ�����ˣ�ˣ��������R/Cң�������ٿ���������ֱ��������GPS����ִ��������Mission Planner�����ϣ���ֻ�輸����������Ϳ���ʹ���ȸ��ͼ���ٻ����˵�λ�á��ٶȺ��н�����ȣ������㻹���������Լ���Pyrhon�ű������ز�����������־�ȡ�
��Ҳ���˰��˵�Droid Planner�����鲻����
��������װ����Ƶ��������GoPro����������ܿ��������˵ĵ�һ�ӽ��ˣ�ͦ��Ȥ�ġ����⣬�㻹���Ը�����������ϵͳ�����������ܳ�Ϊ����ϰ����м������ˡ�
��������Ŀ��������ס�㣬�ǾϽ������μӼ����ڹ��ݾٰ��ȫ�������ɻ���ũ��վ�ı����ɣ���ע��Ӳ������źţ�leiphone_bang�����ظ�����ũ�����ɲ��뱨����


